 官方网站-首页官方网站-首页
官方网站-首页官方网站-首页
新闻中心

发布时间:2025-03-11 18:00:29
阅读量:476次
田达玮
在前不久的春晚上,宇树科技的人形机器人 H1 给大家“转了个手绢”。H1 能做到的绝不仅仅是转手绢,它甚至可以来个原地后空翻,运动能力秒杀绝大部分普通人。其实不仅仅是宇树,近几年,中国科技公司,比如优必选、小米、乐聚、小鹏等等,也纷纷推出了自己的人形机器人。
更重要的是,这些人形机器人已经不仅仅停留在展示层面,它们中的一些,已经把生产成本降到了过去无法想象的程度。比如,能够“舞枪弄棒”的 G1 型号人形机器人售价仅在 9.9 万。
而也就在前不久,我国牵头制定的养老机器人国际标准(IEC 63310)正式发布。或许这些量产的人形机器人,能够在养老领域发挥自己的功能。
来自新华社
不过,现在的人形机器人的外观看起来总让人觉得怪怪的,为什么机器人非得造成人形呢?这真的是最好的选择吗?接下来,我们就说一说人形机器人的发展史,以及它们的特殊作用。
机器人一定得是“人” ?既然要说人形机器人,绕不开的就是“机器人”即 robot,这个词本身的起源,真的有“人形”的含义。Robot 源自捷克语中的一个词“ robota ”,它本意指的是奴役、劳役,奴役、劳役的对象,当然是人了。1920 年,捷克科幻作家卡雷尔·恰佩克(Karel Čapek)一部叫做《罗梭的万能机器人》(Rossum's Universal Robots)的科幻剧火了,由此robot 这个词成为了机器人的代名词。
田达玮
在前不久的春晚上,宇树科技的人形机器人 H1 给大家“转了个手绢”。H1 能做到的绝不仅仅是转手绢,它甚至可以来个原地后空翻,运动能力秒杀绝大部分普通人。其实不仅仅是宇树,近几年,中国科技公司,比如优必选、小米、乐聚、小鹏等等,也纷纷推出了自己的人形机器人。
更重要的是,这些人形机器人已经不仅仅停留在展示层面,它们中的一些,已经把生产成本降到了过去无法想象的程度。比如,能够“舞枪弄棒”的 G1 型号人形机器人售价仅在 9.9 万。
而也就在前不久,我国牵头制定的养老机器人国际标准(IEC 63310)正式发布。或许这些量产的人形机器人,能够在养老(lǎo)领(lǐng)域发(fā)挥(huī)自(zì)己(jǐ)的(de)功(gōng)能(néng)。
来(lái)自(zì)新(xīn)华(huá)社(shè)
不(bù)过(guò),现(xiàn)在(zài)的(de)人(rén)形(xíng)机(jī)器(qì)人(rén)的(de)外(wài)观(guān)看(kàn)起(qǐ)来(lái)总(zǒng)让人觉得怪怪的,为什么机器人非得造成人形呢?这真的是最好的选择吗?接下来,我们就说一说人形机器人的发展史,以及它们的特殊作用。
机器人一定得是“人” ?既然要说人形机器人,绕不开的就是“机器人”即 robot,这个词本身的起源,真的有“人形”的含义。Robot 源自捷克语中的一个词“ robota ”,它本意指的是奴役、劳役,奴役、劳役的对象,当然是人了。1920 年,捷克科幻作(zuò)家(jiā)卡(kǎ)雷(léi)尔(ěr)·恰(qià)佩(pèi)克(kè)(Karel Čapek)一(yī)部(bù)叫(jiào)做(zuò)《罗(luō)梭(suō)的(de)万(wàn)能(néng)机(jī)器(qì)人(rén)》(Rossum's Universal Robots)的科幻剧火了,由此robot 这个词成为了机器人的代名词。
图库版权图片,转载使用可能引发版权纠纷
在后来的发展中,机器人指代的范围变得非常广了。不过世界范围内并没有对“机器人”统一的定义,国际标准化组织(ISO)、电气电子工程师学会(IEEE)、美国材料及实验学会(ASTM)都有自己的定义,侧重点略有不同。
ISO,IEEE,ASTM 对“robot”的不同定义,图片来源:参考资料 2
提取一下关键信息,机器人可以看作是这样一种东西,它是一个由计算机程序驱动的,用来实现某个目的或者解决某个问题的设备,它在物理世界要有实体。有些机器人可能会有一定的自主性,能够跟环境交互做出一些反馈,但无论是哪个定义里,都没有限定机器人一定要是人形的。
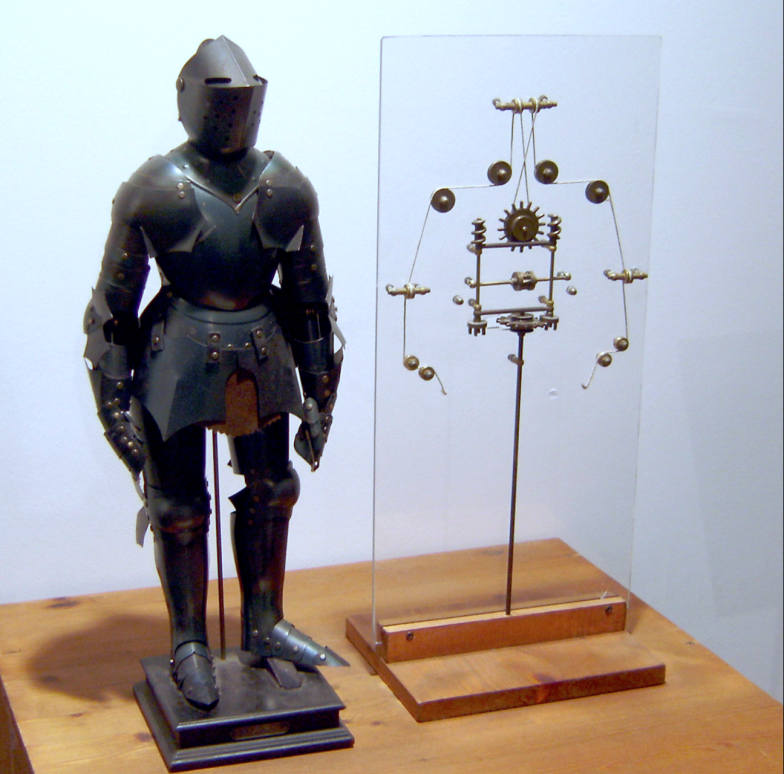
15 世纪达·芬奇设计的机器人偶,并不能算作机器人,图片来源:Wikipedia
人形机器人,难在哪儿?
相信你即便不了解机器人的发展史也能(néng)想(xiǎng)到(dào),人(rén)形(xíng)机(jī)器(qì)人(rén)绝(jué)不(bù)是(shì)最(zuì)容(róng)易(yì)制(zhì)造(zào)的(de)机(jī)器(qì)人(rén)。而(ér)最(zuì)早(zǎo)被(bèi)投(tóu)入(rù)生(shēng)产(chǎn)应(yīng)用(yòng)的(de)机(jī)器(qì)人(rén),也(yě)的(de)确(què)不(bù)是(shì)人(rén)形(xíng)机(jī)器(qì)人(rén)。
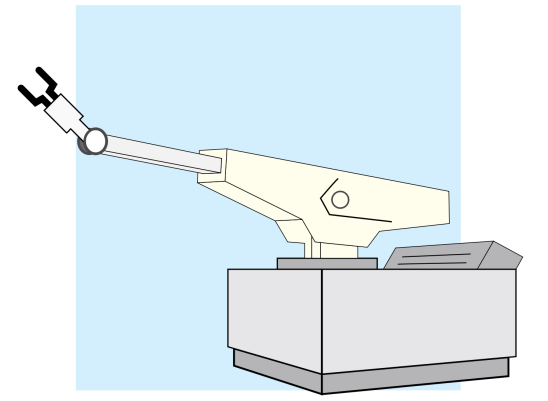
比(bǐ)如(rú),最(zuì)早(zǎo)投(tóu)入(rù)工(gōng)业(yè)生(shēng)产(chǎn)领(lǐng)域的(de)机(jī)器(qì)人(rén) Unimate,它(tā)只(zhǐ)是(shì)一(yī)个(gè)巨(jù)大(dà)的(de)机(jī)械(xiè)臂(bì)。

最(zuì)早(zǎo)投(tóu)入(rù)工(gōng)业(yè)生(shēng)产(chǎn)的(de)机(jī)器(qì)人(rén)——Unimate 机(jī)械(xiè)臂(bì),图(tú)片(piàn)来(lái)源(yuán):Wikipedia
和(hé)其(qí)他(tā)机(jī)器(qì)人(rén)一(yī)样(yàng),人(rén)形(xíng)机(jī)器(qì)人(rén)需(xū)要(yào)解(jiě)决(jué)的(de)难(nán)题(tí)有(yǒu)很(hěn)多(duō),但(dàn)人(rén)形(xíng)这(zhè)个(gè)特(tè)殊(shū)的(de)形(xíng)态(tài),让(ràng)它(tā)们(men)在(zài)站(zhàn)立(lì)和(hé)行(xíng)走(zǒu)上(shàng),要(yào)面(miàn)对(duì)更(gèng)多(duō)挑(tiāo)战(zhàn)。
就(jiù)拿(ná)“站(zhàn)稳(wěn)”这(zhè)件(jiàn)事(shì)来(lái)说(shuō),人(rén)形(xíng)机(jī)器(qì)人(rén)和(hé)四(sì)足(zú)机(jī)器(qì)人(rén)不(bù)同(tóng),四(sì)足(zú)机(jī)器(qì)人(rén)的(de)重(zhòng)心(xīn)更(gèng)容(róng)易(yì)保(bǎo)持(chí)在(zài)支(zhī)撑(chēng)面(miàn)内(nèi),而(ér)人(rén)形(xíng)机(jī)器(qì)人(rén)属(shǔ)于(yú)双(shuāng)足(zú)机(jī)器(qì)人(rén),支(zhī)撑(chēng)面(miàn)积(jī)更(gèng)小(xiǎo),重(zhòng)心(xīn)一(yī)旦(dàn)超(chāo)出(chū)支(zhī)撑(chēng)面(miàn),很(hěn)容(róng)易(yì)摔(shuāi)倒(dào)。
因(yīn)此(cǐ)对(duì)于(yú)能(néng)够(gòu)运(yùn)动(dòng)的(de)机(jī)器(qì)人(rén)来(lái)说(shuō),双(shuāng)足(zú)行(xíng)走(zǒu)的(de)人(rén)形(xíng)机(jī)器(qì)人(rén)也(yě)不(bù)是(shì)最(zuì)佳(jiā)选(xuǎn)择(zé)。在(zài)人(rén)形(xíng)机(jī)器(qì)人(rén)还(hái)在(zài)“蹒(pán)跚(shān)学(xué)步(bù)”的(de)时(shí)候(hou),四(sì)个(gè)轮(lún)子(zi)的(de)自(zì)动(dòng)驾(jià)驶(shǐ)汽(qì)车(chē)(也(yě)可(kě)以(yǐ)算(suàn)是(shì)机(jī)器(qì)人(rén))已(yǐ)经(jīng)在(zài)开(kāi)放(fàng)路面(miàn)上(shàng)进(jìn)行(xíng)测(cè)试(shì)了(le),而(ér)四(sì)足(zú)机(jī)器(qì)人(rén)(狗(gǒu))也(yě)已(yǐ)经(jīng)能(néng)够(gòu)在(zài)崎(qí)岖(qū)山(shān)地(de)中(zhōng)搬(bān)运(yùn)物(wù)资(zī)甚(shén)至(zhì)高(gāo)速(sù)越(yuè)野(yě)了(le)。
不(bù)过(guò)经(jīng)过(guò) 50 多(duō)年(nián)的(de)发(fā)展(zhǎn),人(rén)形(xíng)机(jī)器(qì)人(rén)也(yě)慢(màn)慢(màn)“支(zhī)棱(léng)”起(qǐ)来(lái)了(le)。像(xiàng)波(bō)士(shì)顿(dùn)动(dòng)力(lì)的(de) ATLAS 就(jiù)是(shì)其(qí)中(zhōng)的(de)佼(jiǎo)佼(jiǎo)者(zhě)。
“工(gōng)作(zuò)”中(zhōng)的(de) ATLAS,图(tú)片(piàn)来(lái)源(yuán):波(bō)士(shì)顿(dùn)动(dòng)力(lì)官(guān)网(wǎng)
但(dàn)看(kàn)似(shì)强(qiáng)大(dà)的(de) ATLAS 也有一个致命问题,成本过高。一台 ATLAS 的价格动辄上百万美元,而相比之下,前面提到的能原(yuán)地(de)后(hòu)空(kōng)翻(fān)的(de)宇(yǔ)树(shù)科(kē)技(jì) H1,售(shòu)价(jià)分(fēn)别(bié)在(zài) 65 万(wàn)元(yuán)人(rén)民(mín)币(bì),已(yǐ)成(chéng)为(wèi) ALTAS 强(qiáng)有力的竞争者。
就在今年 2 月召开的 3DEXPERIENCE WORLD 2025 峰会上,波士顿动力公司的联合创始人马克·雷伯特(Marc Raibert)也表示,自己的研究所购买了宇树科技的人形机器人,进行“深入了解”。
相信随着(zhe)人(rén)工(gōng)智(zhì)能(néng)技术以及制造技术的发展,人形机器人可以越来越接近人类。但这可能会带来一个问题,我们真的有必要制作人形机器人吗?
“恐怖谷”效应是怎么回事?
其实对于人形机器人的争议从来就没有停止(zhǐ)过(guò)。而(ér)相(xiāng)比(bǐ)于(yú)其他类型的机器人,人形机器人的外形,也是争议的焦点之一。反对者认为,随着人形机器越来越像人,却又做不到完全逼真的时候,就可能会引起“恐怖谷效应”。
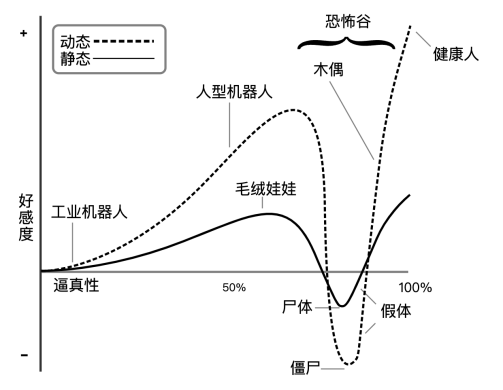
恐怖谷效应这个概念是日本机器人专家森政弘在 1970 年提出的,它的意思是,人们对一个物体的好感度会随着它们越来越像人而提高,但是当它和人类比较像,但又不那么逼真的时候,人们对它们的好感度会急转直下。而到了和人类一样(或者就是真人)的时候,好感度又会提升。
当人形机器人越来越像人,却又和真人不一样的时候,它可能就会陷入这个“恐怖谷”中。

这个急转直下像峡谷一样的曲线,就是所谓的“恐怖谷”,图片来源:Wikipedia
作为人形机器人,很大的一个应用场景(jǐng)是(shì)陪(péi)伴(bàn)。比如,开头提到的养老行业,就可以用它们做智能管家。此外,它们同样可以作为孩子的成长陪伴机器人。考虑到恐怖谷效应,为了避免造成心理上的反感,可能做成一个跟人类(lèi)差(chà)别(bié)比(bǐ)较(jiào)大(dà)的(de)可(kě)爱(ài)形(xíng)象(xiàng),更(gèng)好(hǎo)一(yī)些(xiē)。
图(tú)片(piàn)由(yóu) AI 生(shēng)成(chéng)
当(dāng)然(rán)了(le),也(yě)有(yǒu)研(yán)究(jiū)者(zhě)认(rèn)为(wèi),恐怖谷效应并不绝对,随着人们对电脑生成图像以及机器人的熟悉,年轻一代可能不容易受到恐怖谷效应的影响。
但无论如何,当这些人形机器人在进入人类社会的时候,势必会有一个“磨合期”。
人形机器人,这些优点不容忽视
其实,虽然人形机器人的设计和制造也许面临更多挑战,但人形机器人不仅仅能满足人类的机器“人”情怀,人形机器人也确实有一些其他机器人不可替代的优势,这大概也是很多厂商执着于开发人形机器人的原因之一。
虽然对于某些专业场景,人形机器人的效率不如专用机器人,但要是想建造一个能适应人类生活各种场景的机器人,人形机器人或许是最好的选择。
人类社会中的各种工具、空间场景都是以人类为中心设计的。人形机器人可以直接使用人类已有的扳手拧螺丝、拿起拖把就能拖地,拖完之后还可以转动门把手牵着狗下楼梯遛狗,甚至可以进入人类的车辆开车去买菜,这样的优势,是专用机器人不可替代的。
此外,就如马克·雷伯特所说,有时候发展并不是线性的,在人们制造人形机器人的过程中,可能会催生出其他有用的机器人。因为在人形机器人研究过程中积累的成果经验,可能催生(shēng)出(chū)其(qí)他(tā)非(fēi)人(rén)形(xíng)机(jī)器(qì)人(rén)。或(huò)者(zhě)以(yǐ)其(qí)他(tā)形(xíng)式(shì)为(wèi)人(rén)类(lèi)提(tí)供(gōng)帮(bāng)助(zhù)。比(bǐ)如人形机器人“蹒跚学步”过程中积累的经验,可以应用到外骨骼机器人以及假肢的研发中,帮助身体障(zhàng)碍(ài)人(rén)士(shì)更(gèng)好(hǎo)地(de)行(xíng)走(zǒu)。
对于人体结构的模仿,也对材料、电机等硬件提出了非常高的要求。比如模仿人类手部结构的灵巧手,建造它需要(yào)极(jí)其(qí)精(jīng)巧(qiǎo)的微型电机。
更重要的是,我们想要的人形机器人绝不是一个只有人类外表的空壳。我们希望它们能够与我们交流,能像人类一样观察和思(sī)考(kǎo),与(yǔ)我(wǒ)们(men)互(hù)动(dòng),与(yǔ)之(zhī)相(xiāng)关的(de) AI 技(jì)术(shù)同(tóng)样(yàng)需(xū)要(yào)不(bù)断(duàn)提(tí)升(shēng)(当(dāng)然(rán)在(zài)人(rén)形(xíng)机(jī)器(qì)人(rén)领(lǐng)域之(zhī)外(wài),AI 技术同样在蓬勃发展)。
从科幻小说中幻想的机器人,再到蹒跚学步的前辈们,再到今天行动矫捷的 H1,人形机器人不仅功能越来越完善,价格也不再像过去那样遥不可及,这让它们的量产以及商业应用成为了可能。
除了硬件,近些年 AI 的飞速进步,同样给人形机器人带来了重要的“大脑”。或许很快,我们就会在身边看到人形机器人,而值得我们骄傲的是,在这个过程中,我们中国的机器人、AI 企业,必将发挥重要的作用。
参考文献
[1] https://www.unitree.com/cn/g1
[2] https://www.ieee-ras.org/images/Standards/meeting_june_2021/9-Robot-Term-Discussion.pdf
[3] https://www.humanoid.waseda.ac.jp/booklet/kato_2.html
[4] https://www.sciencedirect.com/topics/computer-science/humanoid-robotic
[5] Cheetham M, Suter P, Jäncke L. The human likeness dimension of the “uncanny valley hypothesis”: behavioral and functional MRI findings[J]. Frontiers in human neuroscience, 2011, 5: 126.
[6] Tong Y, Liu H, Zhang Z. Advancements in humanoid robots: A comprehensive review and future prospects[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11(2): 301-328.
策划制作
作者丨田达玮(wěi) 科(kē)普(pǔ)创作者
审核丨于乃功 北京工业大学机器人工程专业负责人,北京人工智能研究院机器人研(yán)究(jiū)中(zhōng)心(xīn)主任(rèn),博(bó)士(shì)生(shēng)导(dǎo)师(shī)



