 官方网站-首页官方网站-首页
官方网站-首页官方网站-首页
新闻中心

发布时间:2025-08-11 15:30:02
阅读量:320次
【导语】在医疗科技飞速发展的今天,一款名为SRT-H的人工智能手术机器人凭借仅仅17个小时的手术视频学习,成功实现了对手术机器人的精准操控,并在猪胆囊切除手术中取得了100%的成功率,标志着手术机器人从辅助工具向自主执行体的重大跃迁。这一突破性进展不仅预示着手术机器人技术的崭新篇章,也对医学教育、伦理治理等方面提出了新的挑战与机遇。本文将深入探讨SRT-H的技术优势、医学AI的发展前景以及未来医生角色的重塑与伦理挑战。
仅仅观看了17个小时的手术视频,这个具有双层“大脑”的AI就能操控手术机器人,像经验丰富的外科医生那样,精准执行手术操作,而且在遇到突发状况时,可以实时调整手术计划。2025年7月,SRT-H人工智能手术机器人在无需人工干预的情况下,100%成功完成猪胆囊切除手术,标志着手术机器人从“辅助工具”向“自主执行体”迈出关键一步。
撰文 | 李娟(生命科学专业博士)
2025年7月,美国约翰·霍普金斯大学智能医疗机器人系统与设备实验室主任Axel Krieger副教授团队联合斯坦福大学主导的一项研究,取得了突破性进展:一款名为SRT-H(Surgical Robot Transformer–Hierarchy,手术机器人变形体-层级架构)的人工智能手术机器人,在几乎无需人工干预的情况下,成功完成了猪胆囊切除手术。相关研究已发表在《科学·机器人》杂志上。
“SRT-H的100%成功率,标志着手术机器人从辅助工具向‘自主执行体’的关键跃迁。这是医学人工智能发展的重要里程碑。”神州医疗高级副(fù)总(zǒng)裁(cái)兼首席医学官、广东医科大学多模态数据融合应用实验室主任弓孟春教授对笔者介绍说。
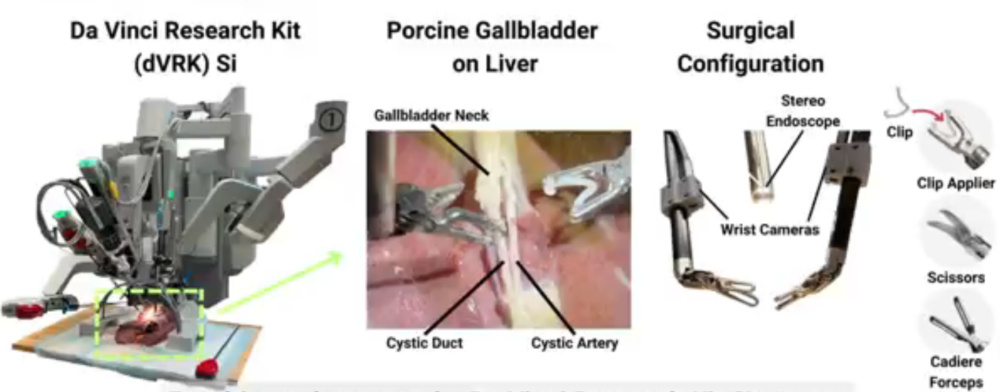
图 1:以达芬奇手术机器人为执行系统的SRT-H自主完成切除离体猪胆囊手术。图从左到右依次为:达芬奇手术套件系统Si、与肝脏相连的猪胆囊、手术配置(立体内窥镜、腕部摄像头、施夹钳、施夹器、剪刀、卡尔迪钳)。丨图源:参考文献[1]
SRT-H智能系统的训练是通过观看学习了17小时手术视频完成,视频涵盖16000个(gè)人(rén)类(lèi)外(wài)科(kē)医(yī)生(shēng)的手术动作,并搭配任务描述字幕强化学习,首次将自然语言作为机器人手术规划与纠错接口。
在实验中,SRT-H成功完成了17步胆囊切除术,面对不(bù)同(tóng)样(yàng)本(běn)的解剖差异、其他组织的干扰、模拟出血以及不完美的图像等状况,该系统能够自主纠错——在8次手术测试中,它平均每台手术自我修正6次。此外,该系统(tǒng)能(néng)通(tōng)过(guò)语音交互接受医生的实时指导并持续学习,模拟“导师指导住院医师”的互动模式。
SRT-H核心技术优势基于两层人工智能系统:第一层AI通过内窥镜视频实时分析手术场景,发出手术操作步骤的指令,将视觉信息转化为自然语言指令(如“分离胆囊动脉”);第二层AI则将指令转化为三维器械动作,精准执行抓取、夹闭、切割等操作。
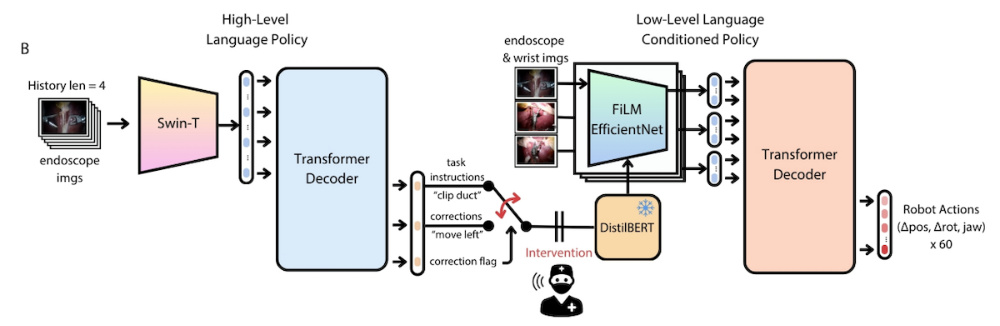
图2:SRT-H的双层“大脑”:语言规划器通过“校正标记”在任务指令和校正指令之间切换,而底层控制器则将选定的指令转化为精确的器械路径。丨图源:参考文献[1]
“SRT-H的双层AI形成协同架构,有效破解了长时序、多步骤手术流程中的动态纠错难题,实现了决策智能与执行精度的统一。”弓孟春说。
手术机器人不再只是辅助
人工智能的概念最早出现在1956年,由美国达特茅斯学院的计算机与认知科学家约翰(hàn)・麦(mài)卡(kǎ)锡(xī)教(jiào)授(shòu)提(tí)出(chū)。其(qí)核(hé)心(xīn)原(yuán)理(lǐ)基(jī)于(yú)计(jì)算(suàn)机(jī)可(kě)精(jīng)准(zhǔn)模拟人类智能行为的技术,包括学习、推理、感知和语言理解等能力。随着计算能力的提升和大数据的发展,AI在多个领域迅速推广,其中,医学成为最具潜力的应用场景之一。
医学AI涵盖医学图像识别、疾病预测与诊断、药物研发、手术辅助、患者管理等多个方面。通过深度学习、自然语言处理等方法,AI能够辅助医生更快速准确地分析医学数据,提高临床效率,降低误诊率,并推动个性化医疗的发展。
在医学AI的发展进程中,手术机器人技术是高度集成AI与临床实践的代表性应用。
传统手术机器人自20世纪90年代问世以来,已经在提升手术精度、降低创伤风险、缩短术后恢复时间等方面展现出巨大优势。最具代表性的系统是美国直觉外科公司(Intuitive Surgical)推出的“达芬奇”手术机器人,该系统通过医生操控机械臂完成精细手术操作,在1997年首获美国食品药品监督管理局(FDA)批准用于内窥可视化和组织牵开,2000年扩展至普通外科手术,获得广泛临床认可。
然而,传统手术机器人(rén)依(yī)然(rán)主要依赖医生实时控制,系统本身并不具备自主“思考”能力。AI的引入推动着传统手术机器人技术从单一设备走向多样化智能平台,标志着手术机器人实现了重大范式转变。
目前的手术机器人主要分为两类:第一类是触觉型(即外科医生引导)系统,需由操作者进行物理操控,以提升手术成功率;第二类是主动型或自主型智(zhì)能(néng)系(xì)统(tǒng),能(néng)遵(zūn)循(xún)完(wán)整(zhěng)的(de)术(shù)前(qián)计(jì)划(huà),在(zài)无(wú)需(xū)外(wài)科(kē)医(yī)生(shēng)干(gàn)预(yù)的(de)情(qíng)况(kuàng)下(xià)完(wán)成(chéng)手(shǒu)术(shù)。
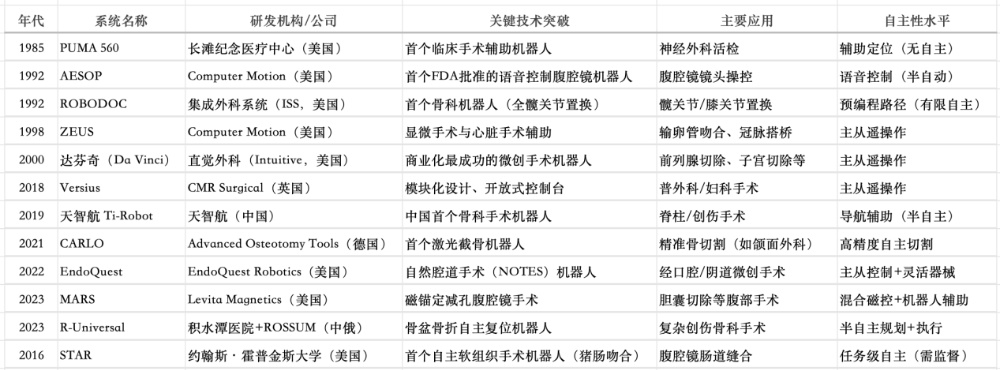
图3:手术机器人系统(SRS)发展里程碑丨图源/表格:作者整理自参考文献[3]
从STAR到SRT-H的技术进化之路
SRT-H的诞生就是建立在先前的实验基础上。其前身是Krieger团队研发的初代智能手术机器人STAR(Smart Tissue Autonomous Robot),即智能组织自主机器人。STAR系统擅长软组织缝合术。该手术是外科手术中最复杂的任务之一,高度依赖外科医生的经验与稳定,难以标准化。
目前,STAR系统从早期的辅助缝合,逐步进化为具备自主识别、路径规划与缝合执行能力的一体化系统:
2014年,Krieger团队首次提出STAR可提升腹腔镜缝合质量;2016年,该团队研发出结合三维成像与近红外荧光(NIRF)视觉系统的自动缝合算法,首次实现活体自主软组织手术;2021年,STAR系统引入第二机械臂处理松散缝线,同时通过荧光缝线实现边界自动识别。
2022年,STAR发展为一个融合近红外荧光成像(NIRF)、3D视觉识别、组织变形追踪、实时控制与深度学习算法的系统,首次在活体猪身上进行自主腹腔镜手术——它能够识别缝合组织的边界,追踪其形变,并自动规划缝线路径,完成闭环操作。在实验中,该系统的缝合间距和咬合深度的稳定性明显优于人类专家和传统机器人,显示出其在术中一致性和可重复性方面的领先优势。

图 4:行软组织缝合术的AI手术机器人STAR系统。丨图源:参考文献[2]
然而,STAR的自主性局限于严格的预设框架,就像“按固定地图行驶”—— 人类医生需提前确定手术方案,机器人仅能在预定义范围内微调,一旦遇到未预设的组织形变或突发情况,就必须暂停,并等待人工干预,对个体解剖差异的适应能力较弱。
对比来看,SRT-H可以视为STAR项目的延续或升级版本。SRT-H不再依赖固定脚本,而是采用语言驱动的分层自主架构,让机器人像经验丰富的外科医生一样,能够动态调整手术策略。
研究显示,SRT-H的动作平稳,且能在复杂场景中保持稳定——即使研究人员改变其起始位置,或用类似血液的染料模糊视野,机器人仍能完美完成操作。
AI赋(fù)能(néng)手(shǒu)术(shù)全流(liú)程(chéng),训练数据是关键
如上所述,STAR和SRT-H在术中表现优异,事实上,搭载AI的手术机器人系统在术前与术后也在发挥重要作用。
术前阶段,AI可利用计算机视觉与机器学习技术对CT、MRI(核磁共振成像)等多模态医学影像进行深度解析,生成高精度的三维解剖模型,帮助医生识别关键结构并优化手术方案。例如,Proprio Vision的Paradigm脊柱手术导航平台可融合术前影像,实现实时解剖映射。
术后阶段,AI可对手术视频和相关数据进行系统分析,量化评估手术质量,识别关键步骤与改进空间。这些分析成果不仅有助于疗效回顾,也为医生培训提供了标准化、结构化的高质量教学素材。
整体而言,AI赋能的手术机器人具备三大核心能力:一是优化手术路径与操作精度,减少创伤与并发风险;二是弥补术者经验差异,提升操作的一致性与标准化;三是增强系统环境感知与自主决策能力,应对术中复杂情境。
值得强调的是,AI与手术机器人正形成一种良性协同机制:手术机器人在运行中不断产生结构化、多模态临床数据,这些数据可反哺AI模型的训练和迭代;而优化后的AI算法又进一步提升机器人的操作效率与智能水平,加速形成标准化、可复制的智能外科流程。
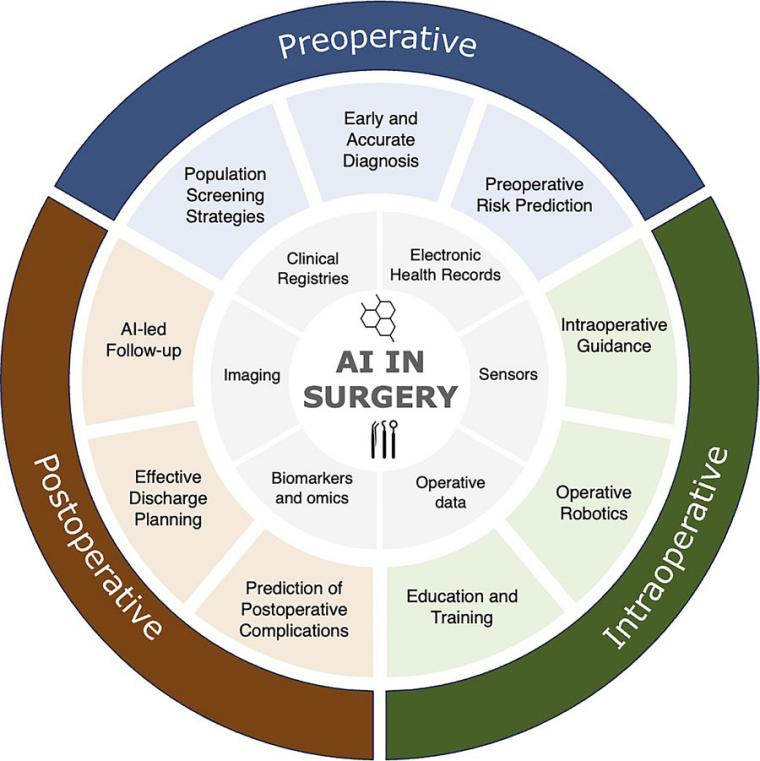
图5:人工智能在手术中的应用(术前、术中和术后三个阶段)及其训练数据来源:在术前阶段,人工智能可用于人群筛查策略制定、疾病(bìng)的(de)早(zǎo)期(qī)精(jīng)准(zhǔn)诊(zhěn)断(duàn)以(yǐ)及(jí)术(shù)前(qián)风(fēng)险(xiǎn)预(yù)测(cè),所(suǒ)依(yī)赖(lài)的(de)数(shù)据(jù)来(lái)源(yuán)包(bāo)括(kuò)临(lín)床(chuáng)登(dēng)记(jì)数(shù)据(jù)、电(diàn)子(zi)健(jiàn)康(kāng)记(jì)录(lù)、影(yǐng)像数据、生物标志物和组学数据以及手术数据。术中阶段,人工智能能够为手术操作提供指导,还可在手术机器人的辅助下发挥作用,这主要依靠传感器数据和手术数据来实现。术后阶段,人工智能有助于有效规划患者出院事宜、预测术后并发症,还能为手术相关的教育和培训提供支持,其数据来源涵盖手术数据、生物标志物和组学数据以及影像数据等。丨图源:参考文献[4]
目前,AI手术机器人技术快速发展,业内对这一技术的前景普遍乐观,但其临床应用仍面临多重挑战:
首先,手术效率不及人类医生,当前机器人完成一台手术所需时间仍偏长。其次,自主性不足,器械更(gèng)换(huàn)等(děng)关键环(huán)节(jié)仍(réng)依赖人工协助,尚未实现全流程自动化。第三,临床适应性有限,大多数实验仍基于离体模型,尚未充分应对呼吸、出血等活体动态干扰。最后,监管体系滞后,针对AI主导手术的伦理与法规尚不完善,影响其在临床的规范落地。
事实上,AI系统真正发挥作用的关键,在于高质量训练数据的获取与管理。特别是在手术视频分析这一领域,算法性能高度依赖于标注数据的准确性与多样性。没有结构清晰、语义明确的训练集,再先进的算法也难以实现稳定可靠的应用效果。因此,精确标注的多模态手术数据集,已成为AI手术机器人系统开发的核心基石与关键瓶颈。
AI时代,医生的角色重塑与伦理挑战
“全面有效地整合多模态医学数据是医学AI发展的关键,也是我们多年来一直在推进的工作。”弓孟春说,“目前,我们联合多家大型三甲教学医院,建设院级多模态医学数据平台。在高质量多模态数据集的基础上,我们研发出了一系列具备全学科、多场景、广覆盖、医防融合特征的生成式医学大模型,并已启动面向医务人员、健康人群和患者的多项具体实践。”
全智能诊疗时代或许就在不远的将来。那么,未来的手术室会变成机器人主导的“无人手术室”吗?未来的医学实践是否还需要医生?需要什么样的医生?医学伦理会面临怎样的挑战?
作为2025年6月刚成立的全国首家AI医学院——广东医科大学AI医学院(GDMU-AIMS)的发起人、推动者之一,弓孟春谈及当今医学教育面临的机遇和挑战,他告诉笔者:“医学AI发展的终极目标不是机器取代医生,而是让优质医疗更具可及性。AI的引入提升了医疗效率,未来医学实践对医生的要(yào)求(qiú)正(zhèng)发(fā)生(shēng)根(gēn)本(běn)转(zhuǎn)变(biàn),我(wǒ)们(men)的(de)医(yī)学(xué)教(jiào)育(yù)与(yǔ)人(rén)才(cái)培(péi)养(yǎng)也(yě)要(yào)与(yǔ)时(shí)俱(jù)进(jìn)。”
弓孟春指出,医学生不再只需掌握操作技能,而必须具备“人机共融的决策能力”——既要能够熟练运用AI工具拓展个人知识边界,又要具备识别算法偏误、数据偏倚与系统局限的能力。在人机协作过程中,医生依然是医疗决策的主导者与责任承担者,这种“技术理解+伦理判断”的复合能力,必须从医学院阶段开始系统培养,成为面向AI时代的基础素养。
据弓孟春介绍,2025年7月,由我国50余位临床医学、医学教育、人工智能、医学伦理法规等方面的专家共同完成的《医学生AI素养的能力清单及测评框架专家共识(2025)》已经发布。
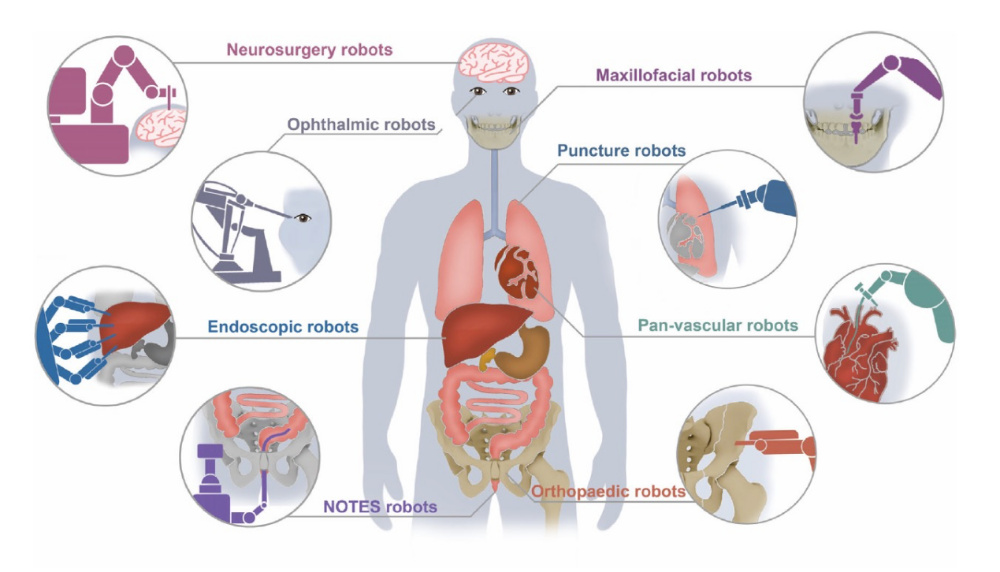
图6:手术机器人的应用领域。神经外科机器人(Neurosurgery robots)主要用于脑部手术;眼科机器(qì)人(rén)(Ophthalmic robots)应(yīng)用(yòng)于(yú)眼(yǎn)部(bù)手(shǒu)术(shù);内(nèi)镜(jìng)机(jī)器(qì)人(rén)(Endoscopic robots)可(kě)用(yòng)于(yú)如肝脏等部位的内镜手术;NOTES 机器人(NOTES robots)适用于经自然腔道内镜手术;骨科机器人(Orthopaedic robots)用于骨骼相关手术;泛血管机器人(Pan-vascular robots)用于血管相关手术;穿刺机器人(Puncture robots)可进行穿刺操作;颌面机器人(Maxillofacial robots)用于颌面部位手术。丨图源:参考文献[3]
另外,随着AI技术深入嵌入诊疗全流程,医学AI的伦理治理已成为亟待应对的课题。比如:责任归属如何划定?算法偏见如何监管?患者隐私如何保障?
当前,我国医(yī)疗(liáo)系(xì)统(tǒng)已(yǐ)广(guǎng)泛(fàn)部(bù)署(shǔ)包(bāo)括(kuò)DeepSeek在内的基座大模型。弓孟春指出,尽管我国《生成式人工智能服务管理暂行办法》已为行业初步设定边界,但在高风险场景(如自主手术、急危重症干预)中,仍需建立更严格的专项伦理审查机制。随着越来越多医学AI产品进入临床研究阶段,亟需一套成熟的、适用于中国特色医疗实践的审查监管规范。
“未来的医学AI发展亟需构建‘技术研发—素养教育—伦理治理’三位一体的推进机制:在技术端,强化多模态模型与临床场景的深度适配;在教育端,加强医务人员对AI的批判性认知与应用能力;在监管端,推动适应我国实际的伦理制度落地。唯有如此,AI方能真正成为值得信赖的健康守护力量。”弓孟春强调。
参考文献
[1] Kim J W B, et al. SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning[J]. Science Robotics, 2025, 10: eadt5254. DOI: 10.1126/scirobotics.adt5254.
[2] Saeidi H, Opfermann J D, Kam M, et al. Autonomous robotic laparoscopic surgery for intestinal anastomosis[J]. Science Robotics, 2022, 7(62): eabj2908. DOI: 10.1126/scirobotics.abj2908.
[3] Liu Y, Wu X, Sang Y, et al. Evolution of Surgical Robot Systems Enhanced by Artificial Intelligence: A Review[J]. Advanced Intelligent Systems, 2024, 6(6): 2300268. https://doi.org/10.1002/aisy.202300268.
[4] Guni A, Varma P, Zhang J, et al. Artificial Intelligence in Surgery: The Future is Now[J]. European Surgical Research, 2024. Published online January 22, 2024. DOI: 10.1159/000536393.
注:本文封面图片来自版权图库,转载使用可能引发版权纠纷。

特 别 提 示
1. 进入『返朴』微信公众号底部菜单“精品专栏“,可查阅不同主题系列科普文章。
2. 『返朴』提供按月检索文章功能。关注公众号,回复(fù)四(sì)位(wèi)数(shù)组(zǔ)成(chéng)的(de)年(nián)份(fèn)+月(yuè)份(fèn),如(rú)“1903”,可(kě)获(huò)取(qǔ)2019年(nián)3月(yuè)的(de)文章(zhāng)索(suǒ)引(yǐn),以(yǐ)此(cǐ)类(lèi)推(tuī)。
版(bǎn)权(quán)说(shuō)明(míng):欢(huan)迎(yíng)个(gè)人(rén)转发,任何形式的媒体或机构未经授权,不得转载和摘编。转载授权请在「返朴」微信公众号内联系后台。



